
Sensors and Perception: Exploring the Technology Behind Self-Driving Robot Kits
Self-driving robot kits have become increasingly popular in recent years, offering individuals the opportunity to build and program their own autonomous vehicles. These kits come with a variety of sensors and perception technologies that allow the robots to navigate their surroundings and make decisions without human intervention. But how exactly do these sensors and perception technologies work? In this article, we will explore the technology behind self-driving robot kits and how they enable these robots to function autonomously.
One of the key components of self-driving robot kits is the use of sensors. These sensors act as the robot’s eyes and ears, allowing it to gather information about its environment. The most common type of sensor used in these kits is the ultrasonic sensor. This sensor emits high-frequency sound waves and measures the time it takes for the waves to bounce back. By calculating the distance between the robot and an object, the sensor can determine if there are any obstacles in its path.
In addition to ultrasonic sensors, self-driving robot kits also often include infrared sensors. These sensors work by emitting infrared light and measuring the amount of light that is reflected back. This allows the robot to detect objects and determine their distance, similar to how bats use echolocation to navigate in the dark. Infrared sensors are particularly useful for detecting objects that are closer to the ground, such as stairs or small obstacles.
Another important sensor used in self-driving robot kits is the camera. These cameras are typically mounted on the front of the robot and capture images of the surrounding environment. The images are then processed using computer vision algorithms, which allow the robot to identify and classify objects. This technology is similar to how self-driving cars use cameras to detect and recognize traffic signs and other vehicles on the road.
In addition to sensors, self-driving robot kits also rely on perception technologies to interpret the data collected by the sensors. Perception technologies use advanced algorithms and machine learning to analyze the sensor data and make decisions based on that information. These algorithms are constantly learning and improving, allowing the robot to adapt to different environments and situations.
One of the key challenges in developing self-driving robot kits is ensuring that the robot can accurately perceive its surroundings. This is where lidar technology comes into play. Lidar, which stands for Light Detection and Ranging, uses lasers to create a 3D map of the robot’s surroundings. This allows the robot to have a more detailed understanding of its environment and make more precise decisions.
In addition to lidar, self-driving robot kits also use GPS technology to determine the robot’s location and navigate to a specific destination. GPS, or Global Positioning System, uses a network of satellites to provide accurate location data. This technology is particularly useful for outdoor robots, such as drones, that need to navigate over long distances.
One of the most impressive aspects of self-driving robot kits is their ability to learn and adapt to new environments. This is made possible by the use of artificial intelligence (AI) and machine learning algorithms. These algorithms allow the robot to analyze data from its sensors and make decisions based on that data. As the robot encounters new situations, it can use this data to improve its performance and make more accurate decisions in the future.
In conclusion, self-driving robot kits use a combination of sensors and perception technologies to enable autonomous navigation. These technologies allow the robot to gather information about its environment, interpret that information, and make decisions based on that data. As technology continues to advance, we can expect to see even more sophisticated self-driving robot kits that can navigate and interact with their surroundings in increasingly complex ways.
Programming and Control: Understanding the Brain of a Self-Driving Robot
Self-driving cars have been making headlines in recent years, with major companies like Tesla, Google, and Uber investing heavily in this technology. But have you ever wondered how these cars actually work? How do they navigate through traffic, avoid obstacles, and make decisions on their own? The answer lies in the programming and control of these self-driving robots.
At the heart of every self-driving robot is its brain, also known as the control system. This system is responsible for processing information from various sensors and making decisions based on that information. The control system is essentially the brain of the robot, and it is what allows the robot to function autonomously.
The first step in programming a self-driving robot is to determine its objectives. What tasks do we want the robot to perform? Do we want it to simply follow a predetermined route, or do we want it to make decisions based on its surroundings? Once the objectives are established, the next step is to choose the appropriate sensors for the robot.
Sensors are crucial for a self-driving robot as they provide the necessary information for the control system to make decisions. These sensors can include cameras, lidar, radar, and ultrasonic sensors. Cameras are used to capture images of the robot’s surroundings, while lidar, radar, and ultrasonic sensors are used to measure distance and detect obstacles. These sensors work together to provide a comprehensive view of the robot’s environment.
Once the sensors are in place, the next step is to program the control system. This involves writing code that will allow the robot to process the information from the sensors and make decisions based on that information. The code is written in a programming language, such as C++ or Python, and it is what gives the robot its intelligence.
One of the key components of the control system is the decision-making algorithm. This algorithm is responsible for analyzing the data from the sensors and determining the appropriate action for the robot to take. For example, if the robot detects an obstacle in its path, the algorithm will calculate the distance and speed of the obstacle and determine whether the robot should stop, slow down, or change its course.
Another important aspect of the control system is the mapping and localization algorithm. This algorithm is responsible for creating a map of the robot’s surroundings and determining the robot’s location within that map. This is crucial for the robot to navigate through its environment and reach its destination safely.
In addition to these algorithms, the control system also includes safety measures to ensure the robot operates within safe parameters. For example, the system may include a fail-safe mechanism that will stop the robot if it detects any malfunctions or errors.
Once the control system is programmed, it is tested and refined to ensure it is functioning properly. This involves running simulations and real-world tests to identify any issues and make necessary adjustments. The control system is continuously updated and improved to enhance the robot’s performance and safety.
In conclusion, self-driving robot kits work by combining advanced sensors with a sophisticated control system. The sensors provide the necessary information for the control system to make decisions, while the control system is responsible for processing that information and controlling the robot’s movements. With ongoing advancements in technology, we can expect to see even more advanced and intelligent self-driving robots in the future.
Challenges and Future Possibilities: The Evolution of Self-Driving Robot Kits
Self-driving robot kits have been gaining popularity in recent years, as more and more people are becoming interested in the world of robotics and automation. These kits allow individuals to build their own self-driving robots, providing a hands-on learning experience and a glimpse into the future of technology. But how exactly do these kits work, and what challenges do they face in their evolution?
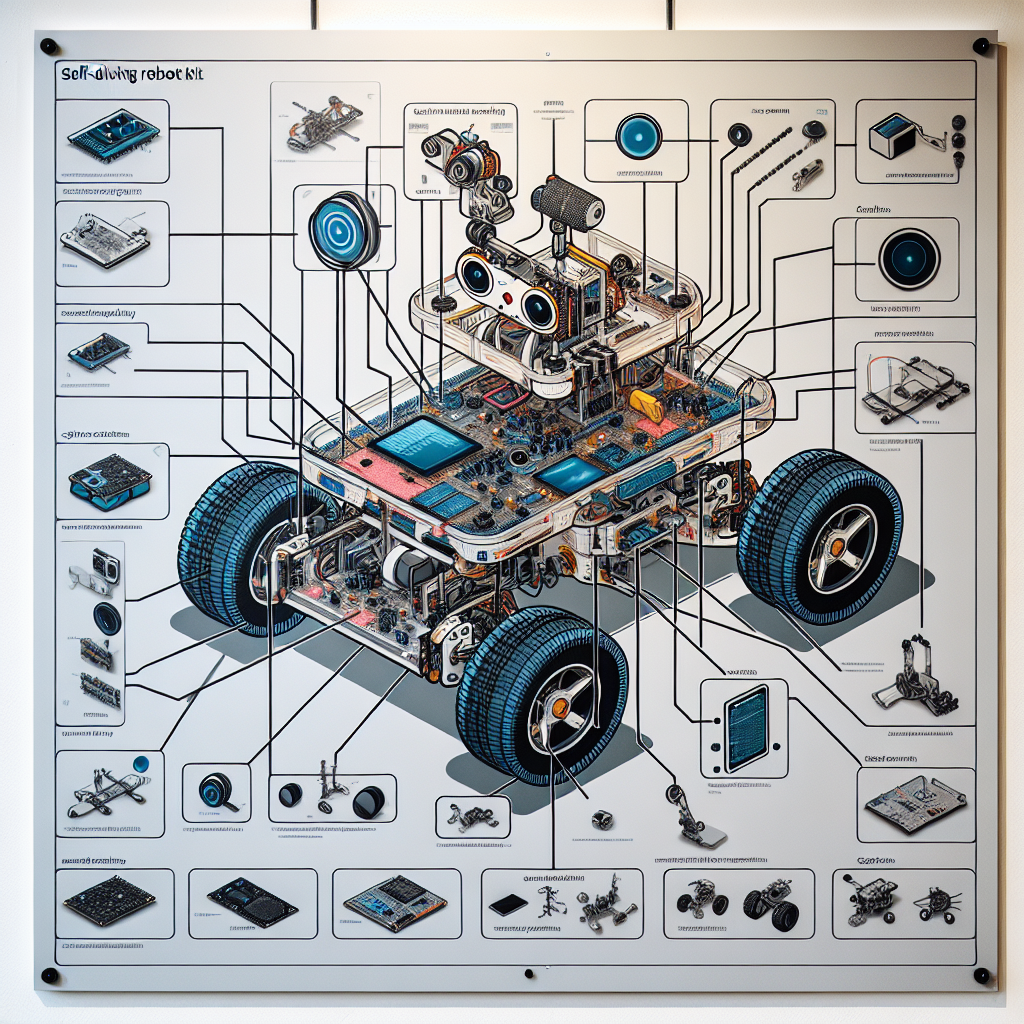
At its core, a self-driving robot kit is made up of various components such as sensors, motors, and a microcontroller. These components work together to allow the robot to sense its surroundings, make decisions, and move autonomously. The sensors, which can include cameras, ultrasonic sensors, and infrared sensors, act as the robot’s eyes and ears, collecting data about its environment. This data is then processed by the microcontroller, which acts as the robot’s brain, and determines the appropriate actions for the robot to take.
One of the main challenges faced by self-driving robot kits is the accuracy and reliability of the sensors. In order for the robot to make informed decisions, the data collected by the sensors must be accurate and consistent. However, environmental factors such as lighting conditions and obstacles can affect the performance of the sensors, leading to errors in the robot’s decision-making process. This is why many self-driving robot kits come with multiple sensors, allowing for redundancy and increased accuracy.
Another challenge is the complexity of programming the microcontroller. While some self-driving robot kits come with pre-programmed code, others require the user to write their own code. This can be a daunting task for those who are new to programming, and even experienced programmers may struggle with the intricacies of creating a self-driving robot. However, with the increasing availability of online resources and communities dedicated to robotics, this challenge is becoming more manageable for beginners.
As self-driving robot kits continue to evolve, one of the most exciting possibilities is the integration of artificial intelligence (AI). AI allows the robot to learn and adapt to its environment, making decisions based on past experiences. This would greatly improve the robot’s ability to navigate and interact with its surroundings, making it more efficient and autonomous. However, the development of AI for self-driving robots is still in its early stages, and there are many challenges to overcome before it can be fully implemented in these kits.
Another potential future possibility for self-driving robot kits is the use of advanced materials and technologies. For example, researchers are currently exploring the use of soft robotics, which utilizes flexible and deformable materials to create robots that can move and interact with their environment in a more natural and human-like way. This could lead to the development of self-driving robot kits that are not only more efficient and accurate, but also more adaptable and versatile.
In addition to these technical challenges, there are also ethical and societal considerations that must be addressed as self-driving robot kits continue to evolve. As these robots become more advanced and integrated into our daily lives, questions arise about their impact on employment, privacy, and safety. It is important for developers and users of these kits to consider these implications and ensure that ethical standards are upheld.
In conclusion, self-driving robot kits have come a long way in terms of their capabilities and popularity. However, they still face many challenges in their evolution, from technical limitations to ethical considerations. As technology continues to advance, it is exciting to imagine the possibilities for these kits and the impact they could have on our future. With continued research and development, self-driving robot kits have the potential to revolutionize the way we interact with technology and the world around us.